

Hybrid Printersハイブリッドプリンター
インクジェットとフラットスクリーン方式とのハイブリッドプリンター。インクジェットとフラットスクリーンそれぞれの特徴を生かし、高速かつ高品質なプリントを実現!
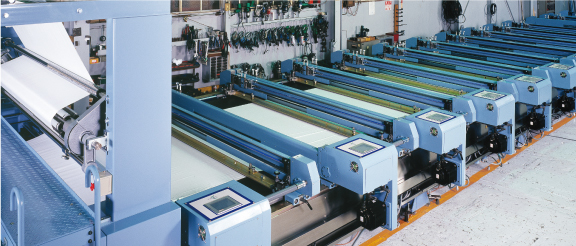
Screen printing machine
Related equipmentスクリーン捺染/関連機器小ロットから大量生産まで、多種多様の生地に対応したスクリーン捺染機を取り揃えております。世界最速、最高精度の捺染機でお客様のビジネスに貢献いたします。

Inkjet Printersインクジェットプリンター
色数、柄に制約がなく、必要な時に必要な分だけをプリントして生産出来るインクジェットプリンター。省スペース型から、高速生産型まで、お客様のニーズに合わせ適切な機種を提案させて頂きます。
Other Printersその他印刷機
長年培った技術やノウハウを基に、お客様の特殊なニーズに応え、各種印刷機、コーティング機等を個別に設計致します。

ICHINOSE Brandブランド
ICHINOSEブランド
東伸工業は、世界がフィールド。
信頼と最先端の技術で、
業界の皆様へ最高品質の機械と、
アフターサービスを提供しつづけます。
INFORMATIONand more... 〉〉
- 2020.07.10
- サイトリニューアルのお知らせ
- 2012.12.20
- “Leader&Innovation 賢者の選択” 放送
NEWS RELEASEand more... 〉〉
- 2020.05.01
- ICHINOSE NEWS vol.23
- 2019.07.01
- ICHINOSE NEWS vol.22
- 2019.02.01
- ICHINOSE NEWS vol.21
- 2018.02.01
- ICHINOSE NEWS vol.20

import and sale
海外輸入販売事業

Inkjet Division
インクジェット事業

Recruit
リクルート
-
>別ページへジャンプします。
-

>別ページへジャンプします。

ご相談・ご質問等ございましたら、
お気軽にお問い合わせください。